Захваты для многофункциональных и коллаборативных роботов являются их продолжением, осуществляющим захват и перемещение объектов по заданным траекториям. Характеристики захватываемого продукта определяют тип механизма захвата и условия его исполнения.
Распространенными являются узкоспециализированные захваты. Например, для хрупких пищевых продуктов используется гибкий электрический захват OnRobot (Дания), позволяющий перемещать объекты нестандартных форм, не разрушая их.


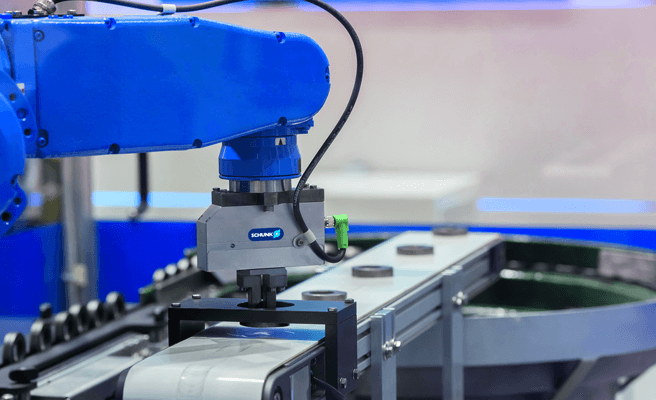
Для порядной и послойной укладки готовой продукции используются механические системы захвата Schunk (Германия), развивающие значительное усилие захвата и позволяющие развивать высокую грузоподъёмность.
Для роботизированных ячеек, где необходимо предусмотреть максимальную площадь контакта и безопасное перемещение габаритных продуктов используют захваты вакуумного принципа действия Schmalz (Германия).
Существуют и другие системы захвата, каждая из которых позволяет решать ту или иную задачу. Специалисты компании «Роксор Индастри» подберут наиболее подходящее решение исходя из своего опыта и опыта наших партнеров, для любой задачи.
Смотрите также