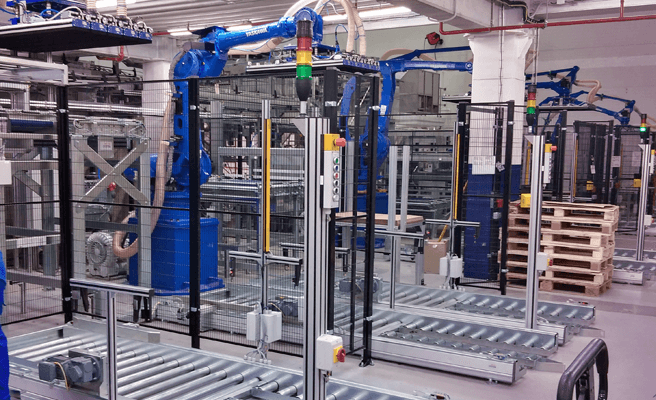
В своих проектах компания ЗАО «Роксор Индастри» изготавливает роботизированные ячейки на основе промышленных роботов компании Yaskawa, страна производитель – Япония.
С помощью роботов возможно решать практически любые задачи по палетированию. Наиболее распространенными задачами являются перемещение коробок, мешков и ведер.
В зависимости от типа продукции, производительности и схемы укладки, из обширной линейки промышленных роботов компании Yaskawa мы выбираем наиболее подходящую модель робота под конкретную задачу.
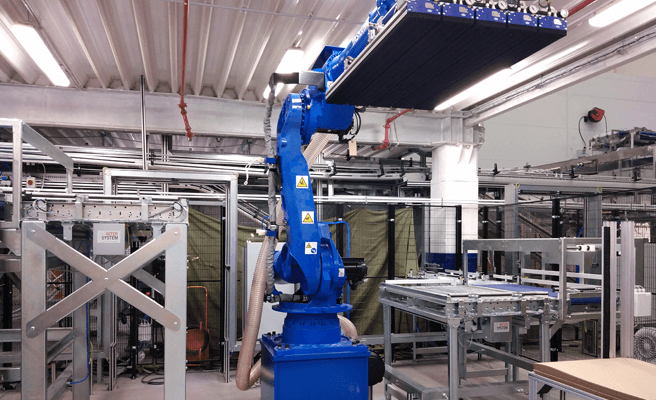
Укладка продукции может осуществляться с помощью вакуумных, механических или комбинированных захватов. Тип захвата зависит от производительности и схемы укладки. Исходя из данных показателей, мы понимаем, какую «pick up» станцию необходимо использовать и какое количество продуктов мы будем брать за раз: фиксированное количество, целый ряд или слой. Зачастую роботу приходится дополнительно укладывать межслойные прокладки и подавать пустые поддоны в зону укладки.
Чтобы убедиться, что все вышеперечисленные операции могут быть выполнены в отведенном месте и с нужной производительностью, помимо чертежей в 2D специалисты компании ЗАО «Роксор Индастри» готовят визуализацию и симуляцию предполагаемой роботизированной ячейки. Это позволяет потенциальному покупателю получить максимальное понимание по проекту на стадии проектирования, вовремя увидеть недочеты и устранить их.
Смотрите также

Наши проекты с применением роботизированной укладки